Hallo Welt! In den Bytespeicher Notizen veröffentlichen wir regelmäßig Themen, die uns auf Treffen und in den verschiedenen Kommunikationskanälen in den zurückliegenden Wochen beschäftigt haben (Schlagworte und Links). Und hier ist die aktuelle Ausgabe, gültig für die 47. Kalenderwoche des Jahres 2015.
Der Erste Versuch einer Vase
Hallo Welt,
der erste Versuch einer Vase ist (fast) geglückt:
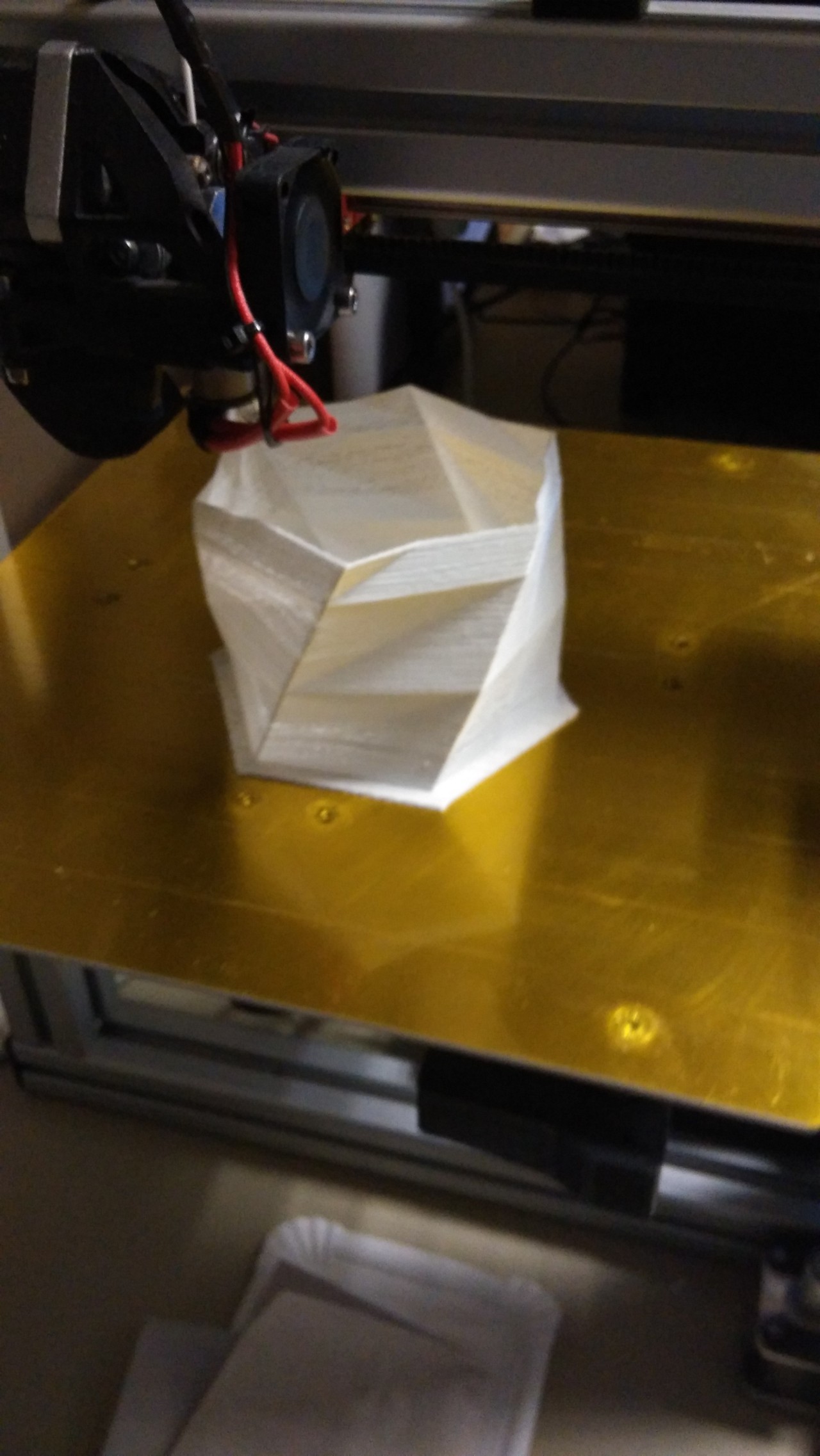
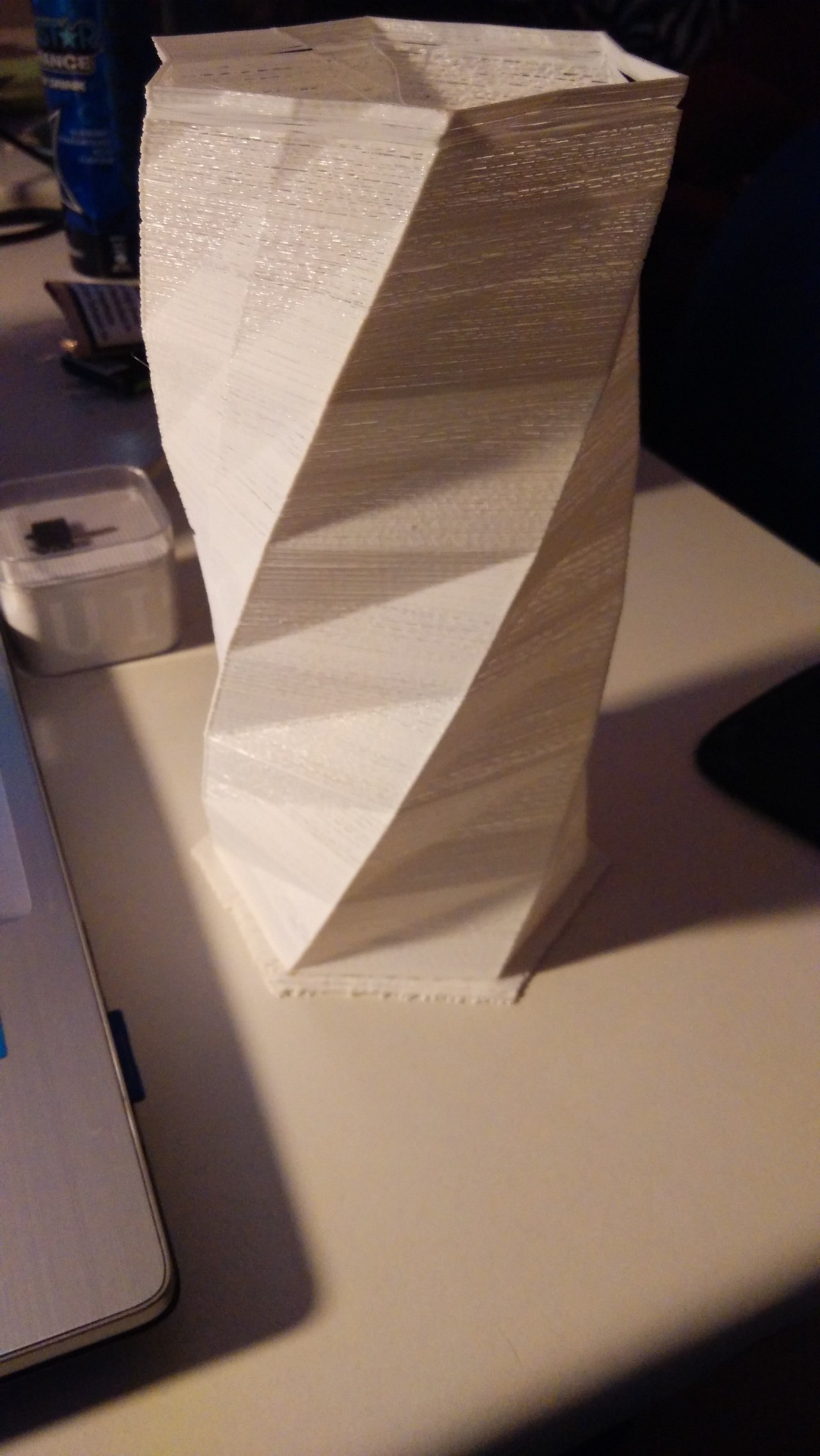
8,5cm Durchmesser und 19cm Hoch.
Dafür hat der Druck knapp 4 Stunden gedauert und 24m Filament verbraucht.
Leider ist diese Vase nicht Wasserdicht geworden wie ich es mir vorgestellt hatte.
Dafür lässt sie sich als alternativen IKEA Lampen Schirm einsetzen 😀

Die Vorlage zu dieser Vase habe ich von Thingiverse.com 🙂
http://www.thingiverse.com/thing:18672
Roomba Projekt
Es gilt die Webseite und andere Kanäle mit mehr Leben zu füllen. Deshalb hier ein kleiner Einblick in die laufenden Projekte.
Zu meinen Füßen fährt und saugt seit einiger Zeit ein Roomba Saugroboter, dessen offene Schnittstelle zum Basteln einlädt. Entferntes Ziel soll sein, irgend wann einmal aus der Ferne (vie VPN natürlich) auf den Roomba zuzugreifen und ihn als eine Art Telepräsenzroboter zu nutzen.
Momentan finden folgende Komponenten Verwendung:
- RaspberryPi (Steuerung + Webserver)
- Ein 3.3V – 5.0V bidirektionaler Spannungswandler
- eine standard RasPi Kamera (ohne IR Filter. Es ist dunkel unterm Sofa.)
- ein USB-WLAN Stick
Die Einrichtung des Webservers und einer Web-Steuerung der Kamera war problemlos, da alles als vorgefertigte Pakete verfügbar. Die Elektronik ist noch fliegend auf einem Breadboard verkabelt, funktioniert jedoch bereits. Die explizit für serielle Kommunikation vorgesehenen RX/TX Pins des Raspberries wurden über den Spannungswandler mit der SCI-Schnittstelle des Roomba verbunden. Die Spannungsversorgung sowohl der 3.3V als auch der 5V Schiene des Spannungswandlers kommt dabei vom RasPi.
Der RasPi legt die Rx/Tx Pins dankenswerter Weise auf /dev/ttyAMA0, was das Einrichten der seriellen Verbindung einfach macht. Ich nutze Python (Dank an mkzero und seinen Python-for-RasPi-Kurs) und das ’serial‘ package. Die Schnittstelle ist vom Hersteller dokumentiert (Link auf pdf) und erlaubt den Zugriff auf alle Aktoren und Sensoren, nicht jedoch auf die originale Firmware inkl. dem Reinigungsalgorithmus.
Eine vollständige Python-Bibliothek zur Ansteuerung habe ich nicht gefunden. Diese auf GitHub deckt jedoch die Basisfunktionen ab. Vielleicht kann ich dort etwas beitragen.
Hier die erste Kontaktaufnahme mit dem Roomba. (Audio an!)
115200 baud it is. We have contact. (And he's from the dark side) pic.twitter.com/pd9eE62ipv
— Ronnie Soak (@Chaos_99) November 11, 2015
Planung von Sammelbestellung (Conrad und Pollin)
Hallo Welt,
Ich plane in der nächsten Zeit eine Sammelbestellung.
Ihr seit alle Herzlich dazu eingeladen eure Bestellungen bei mir anzuhängen. Um allen genug Zeit zu lassen, wird die Bestellung am 16.12.15 Abend abgeschickt. Wer mit bestellen möchte gibt mir das Geld bitte in Vorkasse bis zum 16.12.15.
Ich bin jeden Mittwoch Abend im Bytespeicher.
Bei Fragen könnt Ihr mich unter petr.kirpeit+sammelbestellung@googlemail.com erreichen.
Die Bestellungen können in den folgenden Formularen eingetragen werden.
Mailingliste kaputt
Leider müssen wir euch an dieser Stelle mitteilen, dass seit einiger Zeit unsere Mailingliste bzw. der verwendete Server nicht mehr erreichbar ist. Sobald wir eine neue Liste am Laufen haben, werden wir euch darüber schnellstmöglich informieren.
Bis dahin möchten wir euch darum bitten, für die Kontaktaufnahme eine Alternative zu nutzen. Eine Übersicht zu allen Kanälen findet sich auf unserer Kontaktseite.